Homework Assignment 1
Homework Assignment 1
Due: 2/23/2020, Tuesday (before class)
You are encouraged to use tools and functions in Matlab to carry out symbolic derivations or even check the final results of representational conversions (e.g. ss2tf). However, in your write up, any use of Matlab is required to be clarified. You are also encouraged to append Matlab scripts, Matlab command line result display, and Matlab workspace screenshots.
Problem 1

The controller and the plant are given as:
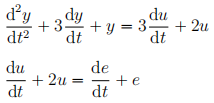
(a) Without using Laplace transform and by only manipulating these differential equations in time domain, find a differential equation relating the input e(t) to the output y(t) without needing the intermediate variable u(t).
(b) By finding the transfer functions between {e(t), u(t)} and {u(t), y(t)} and by concatenating them, find a differential equation relating the input e(t) to the output y(t) without needing the intermediate variable u(t).
(c) Comparing the results of the two approaches above.
Problem 2

The controller and the plant are given by transfer functions:
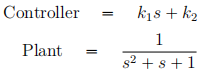
(a) What is the type of the controller (P, PD, or PID)? If the plant represents a mechanical system, what elements would it have?
(b) Find the transfer function that relate the command input YD(s) and the disturbance V (s) to the output Y (s).
(c) Convert this expression into a differential equation whose solution is the output y(t) and the forcing functions contain yD(t) and disturbance v(t).
(d) Now, suppose that you are interested in the error e(t) instead of the output y(t). Find the transfer function that relates the command input YD(s) and the disturbance V (s) to the error E(s)
(e) Convert this expression into a differential equation whose solution is the error e(t) and the forcing functions contain yD(t) and disturbance v(t).
Problem 3
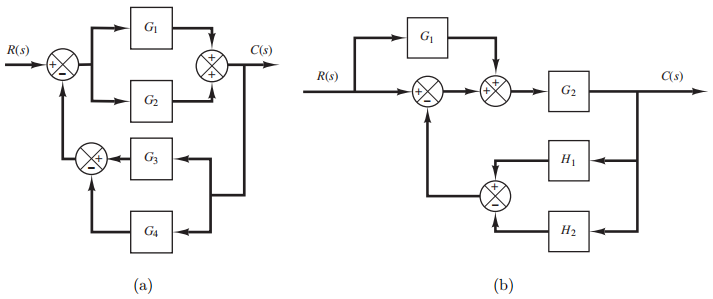
Simplify the two block diagrams above to obtain  .
.
Hint: read Ogata Example 2-1 to learn how to simplify block diagrams in a more efficient manner.
Problem 4
We will be needing to use determinants and inverses of matrices. This problem asks you to review how to compute these - note that Appendix C starting on page 874 discusses these operations.
Consider the following matrix:
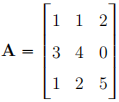
(a) Compute the determinant of A (please use a rule for computing det (A) that is valid for any size, not the simple rule that applies only to 3 by 3)
(b) Compute the adjoint matrix adj (A)
(c) Compute the inverse of the matrix using the previous results using
Problem 5
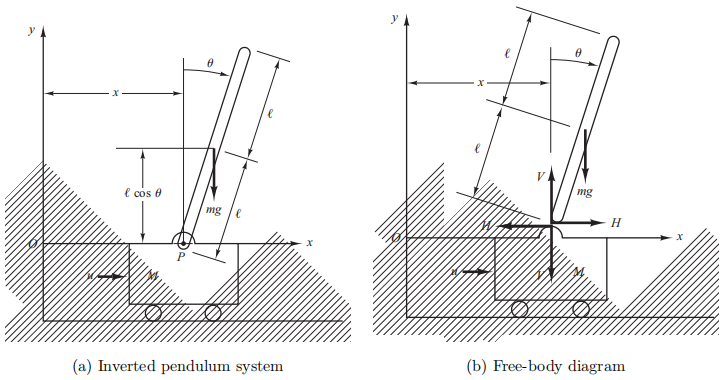
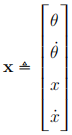
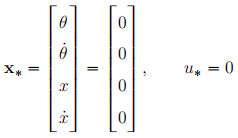
Let us define the state vector as:
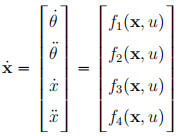
(i) Modeling the system using state-space representation. The following format is expected, and please find the explicit analytical expressions for  .
.
Please note that the assumption of small  and
and  does not hold.
does not hold.
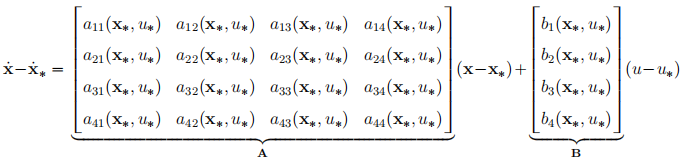
(ii) Linearize the system state equation around ( ,
,  ). The following format is expected:
). The following format is expected:

The matrices A and B are explained more explicitly in the equation rewritten below, and please find the explicit analytical expressions for  and
and  :
:
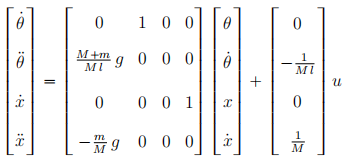
(iii) In this part, let us assume the moment of inertia to be zero, I = 0. Evaluate equation (10) using the following values for and :
How does the resulted system state equation compare to the following equation (12)?
2021-02-24