MAT3300 Final Project
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
Final Project
Atomic force microscopy (AFM) is currently the only method capable of imaging small virus morphology in real-time under environmental conditions, with a spatial resolution routinely reaching 3-5 nm. A schematic of the atomic force imaging principle is presented in Fig. 1 below.
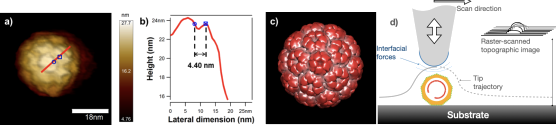
Figure 1: a) Example of an AFM image of a BMV particle in aqueous medium. b) Cross-section showing the shape profile and typical attainable resolution. c) Molecular model. d) Schematic of the atomic force probe-sample geometry. The probe is in the shape of a rounded, inverted cone (gray). The sample is formed of a virus (orange) adsorbed on the surface of a flat, solid substrate. As the probe tip is laterally scanned over the substrate, the probe-sample distance is kept constant, and the tip trajectory relative to a reference position is recorded.
The purpose of this Project is to model the deformation of a two-dimensional virus capsid subjected not to crossing the substrate it lies on when at rest.
A point A in the plane corresponds to a vector in R2 of the form  where xA ∈ R denotes the abscissa of the point and yA ∈ R denotes its ordinate. Let us consider a Cartesian frame for the two-dimensional plane with origin
where xA ∈ R denotes the abscissa of the point and yA ∈ R denotes its ordinate. Let us consider a Cartesian frame for the two-dimensional plane with origin  and with canonical directions
and with canonical directions  and
and 
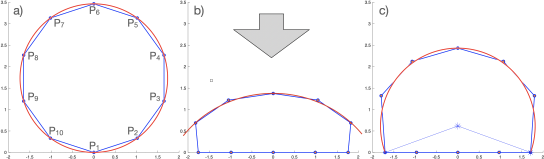
Figure 2: a) A convex regular polygon with n = 10 edges initially in contact with the surface at one fixed vertex. b) The compressed shape under a constant, uniaxial (normal) force. Red: the circular sector that best fits the free perimeter. c) The final shape after removal of the normal force under the constraint of irreversible adhesion.
The position vector associated with the point A is denoted by OA; the transpose of a vector OA is denoted by ↑↓OAT = (xA, yA); the angle between three points A, B and C with vertex at B is either denoted by ABC or by a Greek letter. The Euclidean inner product and the vector product between two vectors OA and OB are respectively denoted by OA · OB = OATOB and OA x OB. The Euclidean norm of OA is denoted OA.
Matrices, apart from the identity matrix I and the square null matrix O, are denoted by capital Greek letters. Tensors are denoted by boldface capital Latin letters.
Let n ≥ 3 be an integer number. A regular polygon with n edges is the portion of plane within a non-self intersecting closed broken line, whose n edges have all the same length.
When a vertex Pi of the convex regular polygon with n edges under consideration undergoes the action of an applied body force, we denote by Pi → the new coordinates of the vertex in the plane. Assume that the vertex P1 undergoes no deformations. Let F = (ωfi)n i=2 → R2n↑2 denote the array of applied body forces acting on the polygon, where the vector ω fi denotes the applied body force acting on the vertex Pi. The application of the force vector f ω i on the point Pi displaces the position vector ↑↑↓OPi by a vector ωui, and transforms the vector OPi into the vector OPi via the following relation:

We denote by ε the length of any edge of the undeformed reference configuration of the convex regular polygon with n edges under consideration, namely,

where the indices are meant from now on modulo n.
Since the point P1 undergoes, by assumption, no deformation we let ωu1 = (0, 0)T . The stretching energy associated with the displacement
is computed via Hooke’s law, i.e.,

where the elastic constant k > 0 is associated with the elongation properties of the constitutive material, and the nature of the energy is aptly recalled by the subscript “s”.
The stretching energy Js(U) can equivalently be expressed in matrix form. The matrix associated with the stretching elastic force is a 2n x (2n - 2) matrix of the form:
Therefore, the stretching energy Js(U) in matrix form is given by:
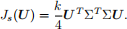 (1)
(1)
The variation of the angle between two consecutive edges is also associated with a change in the energy. From now one, we will refer to this kind of energy as bending energy. Denote by ϑi = Pi↑⊋1PiPi+1 the angle between the points Pi↑1, Pi and Pi+1 that intersects the interior of the polygon under consideration.
If the action of an applied body forces changes the angle ϑi into the angle 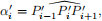 the corresponding bending energy is given by
the corresponding bending energy is given by

where the elastic constant ϖ > 0 is associated with the bending properties of the constitutive material.
Letting 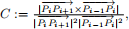 we can express the total bending energy in terms of the vertices displacements:
we can express the total bending energy in terms of the vertices displacements:

The bending energy Jb(U) can equivalently be expressed in matrix form. The matrix associ-ated with the bending elastic force is a n ↔ (2n ↑ 2) matrix:

Therefore, the bending energy Jb(U) in matrix form is given by
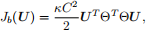 (2)
(2)
where the nature of the energy is aptly recalled by the subscript “b”.
The search for an equilibrium position for the deformed polygon amounts to minimizing the corresponding total elastic energy:
J(U) := Js(U) + Jb(U).
In view of the geometrical constraint according to which the vertices do not have to cross the given flat surface, the admissible displacement fields are to be sought in the following set:

Finding the equilibrium position amounts to determining the unique tensor U that solves the following variational inequalities:
 (3)
(3)
Note that the model in (3) is not amenably solvable in a computer, since computers are only capable of solving linear systems while they are not able, in general, to solve variational inequalities.
Problems
(1) [20 points] Code a script that takes a positive integer n as input, and that returns the position of the vertices of a regular polygon such that the origin (0, 0)T is the vertex that undergoes no deformations, and such that all these vertices are located on a circle of radius R = 2. The substrate the deformed polygon must not cross thus takes the form {y = 0}.
(2) [5 points] Verify, numerically, that the matrix !T ! appearing in the formulation of the stretching energy (1) is symmetric and strictly positive-definite. You can start by consid-ering the provided script blktridiag.m. In order to save memory, you may want to use the MATLAB built-in function sparse() or its analogue in Python.
(3) [5 points] Verify, numerically, that the quantity  introduced in the formulation of the bending energy (2) is independent of the index i.
introduced in the formulation of the bending energy (2) is independent of the index i.
(4) [10 points] Verify, numerically, that the matrix ΘTΘ appearing in the formulation of the bending energy (2) is not, in general, invertible. What does this conclusion imply from the Physics point of view?
(5) [15 points] Set the number of vertices n = 30. Assume that k = ϖ = 1.0. Under the assumption that on each point of the polygonal virus capsid at rest a vertical force with intensity equal to 0.025 is acting, compute the deformed reference configuration of the virus capsid by resorting to the provided script SolverASM.m, that implements the Active Set Method.
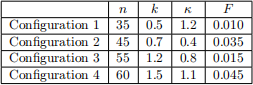
(6) [20 points] Following the strategy implemented to address item (5), generate a figure for each of the configurations listed in the table below, where F denotes the intensity of the vertical force acting on each vertex.
(7) [20 points] Starting from the deformed reference configurations recovered upon completion of item (6), resort to the provided scripts findEquilibrium.m and correct.m to determine the shapes at which the virus capsid attains the minimal internal energy under the assump-tion that the points of the deformed reference configurations recovered upon implementing the procedure described in item (5) and that are in contact with the substrate continue remaining in contact with the substrate during the process determining the new optimal shape. Generate a figure for each configuration and comment the results you obtained.
(8) [5 points] Discuss the results obtained in item (7) if the script correct.m is not run after the script findEquilibrium.m. What might cause the inconsistencies you should observe in the results you obtained?
2025-07-23