electronic circuits
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
|
Abstract (up to 150 words) Please write an Abstract of the proposed project in non-specialist language (i.e. comprehensible to someone outside your department) to allow review panel members or other colleagues to understand your proposed project easily. |
|
The global pandemic COVID-19 speeds up the development of online education. While the conventional lectures could be delivered through online teaching, the delivery of hands-on experiments related to robotic systems remains challenging. This project aims to develop a comprehensive simulation-based education platform to improve the teaching performance of robotics-related modules. The developed platform would include designing and simulation of electronic circuits, mechanical systems, and robotic control system, providing a comprehensive learning experience. The simulation-based education platform would be tested and evaluated based on the feedback and performance of the involved students. |
|
Aims and Objectives (up to 100 words) Please state what the proposed project intends to achieve, what the achievements will look like and what tangible activities and benefits are expected. This may include a statement of research questions, if appropriate. |
|
Aims: This project aims to develop a comprehensive SE education platform for students learning robotics-related modules and study the effectiveness of using SE platform in the teaching of robotics-related contents. Objectives: 1. The development of the SE platform provides students a simulation platform to obtain experience in designing electronic circuits, mechanic systems and robot control systems. 2. The platform allows students to evaluate their design results of supporting the performance about the integrated robotic systems. 3. Appropriate assessments are designed to assess the learning outcomes of practical work successfully. |
|
Approaches and Methodology (up to 250 words) Please briefly outline the methods to be used to implement the proposed project. |
The overall work for this project could be divided into three parts, building independent simulation blocks, integrating separated simulation blocks, and developing evaluation models for student performance. The overall work is shown in Fig. 1.
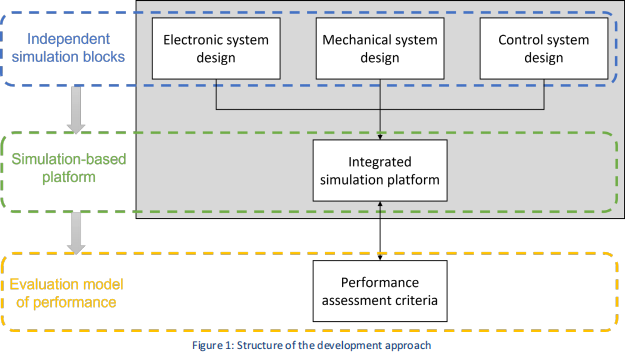
• Independent simulation blocks
The project will start with building independent simulation blocks, including electronic system, mechanical system, and robot control system. For each system, it should include interactive components applicable to robotic systems.
For instance, the electronic system design toolbox should include basic sensors, actuators and control units, students should be able to assemble the components together and then debug with the assembled system. The simulation blocks of mechanical parts could be built with virtual simulation platform like Raisim, SimScape and MuJoco. The electrical parts could be simulated with online platform like TinkerCAD.
• Simulation-based platform
After each simulation blocks are finished, the next step is to integrate the blocks for a simulation-based education platform. Each block could be treated as a black-box, given specific input, the black-box could output corresponding responses to other blocks.
For instance, given a command to rotate one joint of the robot arm, the control system block will output a command to electronic system block to generate corresponding torque output; then the torque would be applied to mechanical system block to drive the robot arm; finally the movement result will be measured and send to control block as feedback signal to form a closed-loop system. Together the three blocks formulate a complete platform, representing the important contents in constructing complete robotic systems.
The realization of these functions could be implemented in Matlab, the Raisim and SimScape have I/O ports with Matlab, the electrical parts could be simulated in Simulink. Together with all the parts, the final simulation platform could be built in Simulink/Matlab. With XJTLU has been equipped with Matlab license and PC lab, the environment will be easily accessible to students.
• Evaluation model of performance
In this part we aim to develop evaluation model of the performance. There are some influential evaluation models in traditional higher education, like Kolb’s experiential learning model, Brookfield’s four lenses model. The project aims to use these models to evaluate the student performance. The evaluation data could be collected in several ways: anonymous questionnaires specifically designed for robotics-related modules; student feedback module questionnaires and grading results for robotics-related modules. The project would compare the results in two consecutive years, and also include the data in previous years, as a basis for teaching without the proposed simulation platform.
All the parts will be charges by the PI, Yuqing Chen (module leader of MEC305 on robotic control systems), and supported by CI, Tianru Zhang (module leader of MEC104 on designing electronic systems) and Qinyao Liu (module leader of MEC206 on modeling mechanical systems). All investigators have transnational educational background and Yuqing Chen has been awarded the fellow of the Higher Education Academy (Recognition reference: PR227166) in 2021.
Expected Project Outcomes and Deliverables, and Potential for Future Development (up to 200 words).
Note that funding can be requested for either (i) disciplinary pedagogical research projects that reflect and evaluate current practice or (ii) development projects that propose educational innovations aiming at enhancing teaching, learning or assessment.
Expected outcomes:
1. A comprehensive simulation-based platform for robotics-related teaching with solid performance evaluation
2. Evaluations of simulation tools in online learning and teaching for practical engineering sessions
3. Potential applications of simulation technology for teaching and lab sessions in other remote teaching modules
4. Student training in software skills
2025-05-30
This project aims to develop a comprehensive SE education platform