IDAT7213 Final project on Path planning and motion planning
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
IDAT7213 Final project on
Path planning and motion planning
• This project assesses your ability in UAV control.
• Tasks to be done:
– Path planning
– Motion planning
– Controller tuning
• Coding language: Matlab/Simulink
Drone Racing
Rules
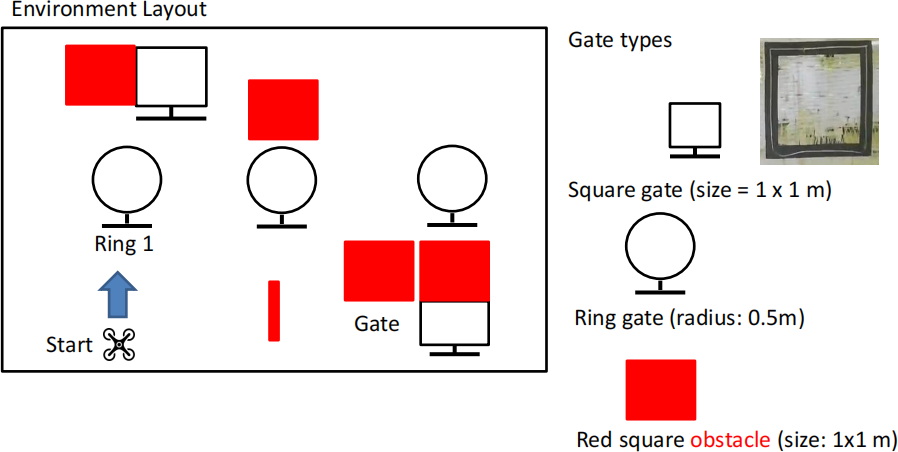
The UAV must pass or bypass the gates in order while avoiding red obstacles.
Drone Racing
Gates to pass in order: Ring 1 -> Gate 1> Ring 2 -> Ring 3 -> Gate 2->origin 3D coordinates (x,y,z) of the gate centers are given in the brackets.
Only one round is enough.
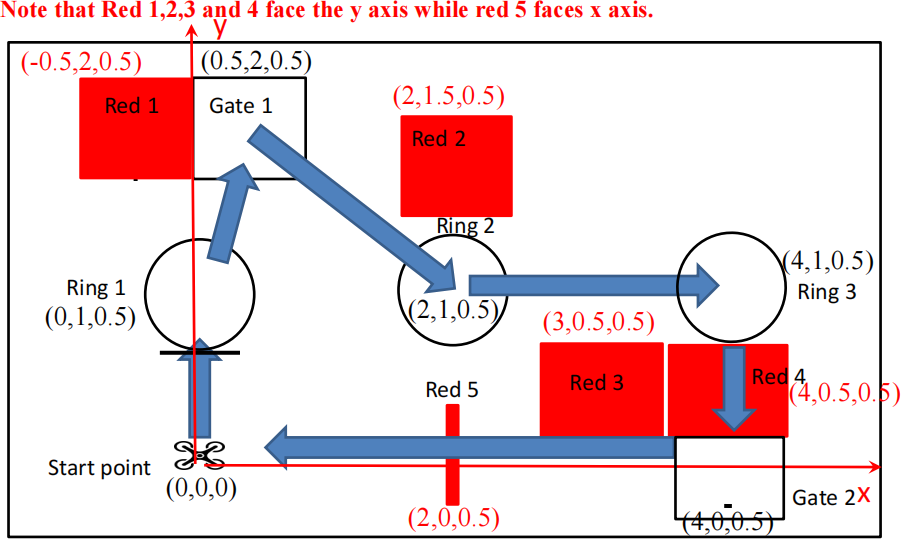
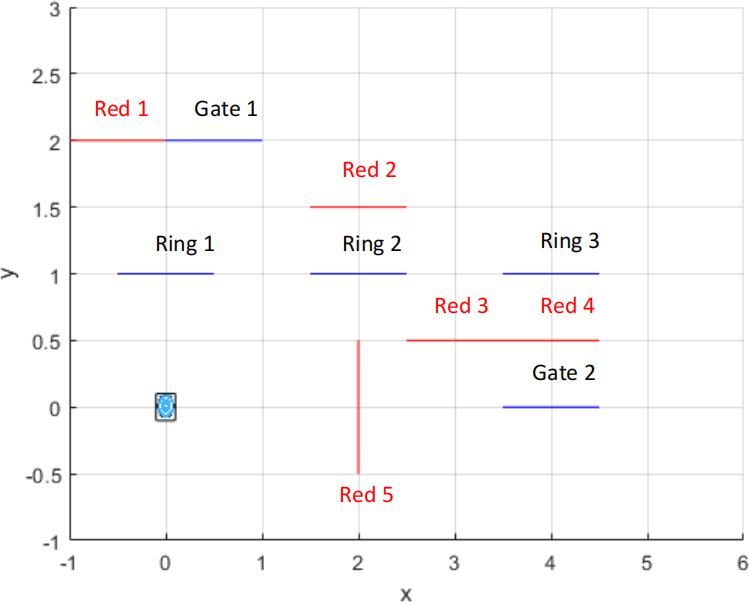
Top view
Tasks
• Given the map with obstacle information, you are required to:
• 1. use path planning algorithms to find a feasible path.(If you manually design the waypoints, you will get a low grade for this part.)
• 2. use motion planning to smooth the path.
• 3. tune your controller gains to let it fly faster. (feasible gains are given in the programme. You can tune them.)
Assessment
• 1. the planning time you used for the path planning.
• 2. the time your drone used to finish the task.
• The following will be considered as failed to finish the task:
– Collide with the obstacles.
– You did not go back to the origin.
Assessment Criteria for path planning
• We mainly use the following criterion to assess this:
• How much time you used to plan the path.
• The length of the path will not be assessed. However, it should be noted that if your path is longer, your drone may need more time to follow it.
• You need to include the path planning code and indicate the planning time in your program.
Assessment Criteria for passing the gate
1. You have to pass through the gates in order. If you skip one, then this gate will not be counted.
2. You have to avoid collisions with the gates. If you collide with the gate, then this pass will be counted as a failure.
3. If you pass zero gates, you will get a very low score. if you pass all the gates using the shortest time, you will get a very high score (~100) (20 marks for each gate/landing point).
4. If someone pass the same number of gates, the one who used more time will have a lower score (the score to be lowered will be determined based on the time).
Additional info
• Check whether you are back to the origin:
• The landing errors for three axes are all ±0.1m. Which means that your x,y coordinates are both within (-0.1,0.1) while z axis is within (0,0.1). Otherwise, you have not gone back to the origin. The time when your coordinates are within the required ones is considered the time you have passed the origin.
• For other gates, as long as you are within the gate and do not collide with the gate, you are considered as having passed it successfully.
• Your drone can be considered as a point mass, which means that its size is 0.
• You can also use learning-based method such as reinforcement learning.
• Then, you do not need to split the tasks into planning and control. You can just use one neural network model to finish the task as long as it passes the gates and does not collide with the obstacles.
Files to submit
1. Matlab code for the path planning and motion planning.
▪ Indicate the path planning time in the code.
2. Simulation file for the task
▪ Make sure the code is runnable.
▪ Make sure the version can be opened in Matlab2020b. If not, please use “save or export to a previous version”.
3. Short report
▪ Show the path planning plots (top view) and time used for the planning.
▪ show the final path of the drone flied (top view) and indicate the number of gates passed and time used to pass these gates.
▪ Submission notes:
▪ Zip all three files into one file.
▪ Name the file as: LastName FirstName_ Student ID_ IDAT7213
Hints
1. Use the center of the gate as goal points.
2. If you find it hard to plan the path, you could also set the goal points manually. However, you will lose points for the path planning.
3. You are allowed to plan the motion multiple times. For instance, if you pass 4 points, you can plan the motion four times.
4. You are also allowed to plan the path multiple times if you want. However, this could cost you more time for the planning.
2025-05-16