ELEC 207 Instrumentation and Control Second Semester Examinations 2020-21
Hello, dear friend, you can consult us at any time if you have any questions, add WeChat: daixieit
ELEC 207
Second Semester Examinations 2020-21
Instrumentation and Control
1. Annealing is a critical process in semiconductor manufacturing where silicon wafers get rapidly heated to get temperatures using powerful infrared heaters. Annealing helps to reduce defects in materials after implantation or deposition processes.
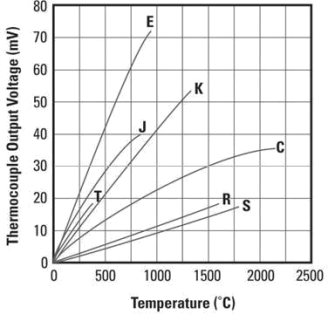
a) You have been asked to design a temperature sensor an annealer with a range of up to 1500°C.Select a suitable thermocouple from the table below and give an explanation for your choice.
b) To record the temperature, you use a microcontroller with an ADC. The ADC is referenced to a 2.048V reference voltage source. To make use of the entire range of the ADC, what gain does the amplifier require for your chosen Thermocouple?
c) You want to read the temperature with a resolution of 0.5°C. What is the minimum number of bits that your ADC requires?
d) The thermocouple has a time constant, τ, of 300ms. If the annealer heats from room temperature (20°C) to 820°C. What equation describes this system? how long would the thermocouple need to read a temperature of 812°C?
e) Your temperature sensor has an accuracy of 1°C. The following successive data points are recorded 778.4°C, 778.1°C, 779.2°C, 778.9°C, 778.2°C, 778.6°C.
i) Calculate the best estimate of temperature that can be obtained. Give the equation describing it.
ii) Estimate the standard uncertainty of the individual temperature measurements associated with random errors only, using the measurement results provided. Show the mathematical expression used for the calculation.
iii) Calculate the standard uncertainty of the temperature measurement associated with the sensor accuracy only, assuming a uniform probability distribution of the errors within the accuracy range. Show the mathematical expression used for the calculation.
f) The wires to your thermocouple run in close proximity to the power lines for the heaters. What type of interference will be dominant and what strategy can you use to reduce interference? Explain why this would work.
Total 25
2. a) Draw a circuit diagram for a load cell using 4 strain gauges in a Wheatstone bridge.
b) Indicate where the strain gauges would be placed on a single point load cell and label as in the circuit diagram. Indicate where the force would be applied:

c) Discuss the advantages of a Wheatstone bridge in this application and give the transfer function of a Wheatstone bridge.
d) Discuss two design options you have to amplify the signal generated by the Wheatstone bridge. What are the advantages and disadvantages of each option?
e) Explain how a successive approximation ADC works.
f) Discuss the advantage of a wire-probe measurement over a two-wire measurement.
g) Define the following types of error (use graphs to illustrate):
i) Non-linearity error;
ii) Hysteresis.
h) Explain accuracy and precision in relation to sensors. (use graphs to illustrate)
Total 25
3. You have been asked to use a proportional controller to make a stable closed-loop system. The transfer function of the plant is:

a) Draw a block diagram to describe a negative feedback system involving a cascade controller with transfer function C(s) and a plant with transfer function P(s). Clearly mark the input, X(s), output, Y(s) and the error signal, E(s).
b) Write the closed-loop transfer function H(s) = Y(s)⁄X(s) in terms of C(s) and P(s).
c) Calculate the position of the poles and zeros of C(s).
d) Draw the root locus for C(s). Clearly indicate where K=0 and K=∞.
e) What property of the root locus makes it important that K is not chosen to be too large?
f) Write the characteristic equation of the closed-loop system as a function of both K and s.
g) Express the characteristic equation as a polynomial in s with coefficients that involve K.
h) Use Routh-Hurwitz to assess whether the closed-loop system is stable when K=1.
4. a) This question relates to four systems. The transfer functions of the systems are as follows:
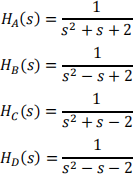
i) Which one of the four systems is stable?
ii) What is the system type for HA(s)?
iii) What is the order of HD(s)?
iv) What are the poles of each of the four systems?
v) Which two systems will have an oscillatory impulse response?
b) You are designing a compensator to reduce the overshoot of a system defined by the transfer function, G(s), where:
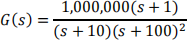
i) Draw the Bode Plot for G(s). Clearly mark any relevant frequencies. Gains and phases.
ii) Use your Bode Plot to estimate the phase margin for G(s) and the associated frequency
iii) What is the overshoot for the uncompensated system?
iv) The required overshoot is 20%. What is the required damping ratio?
v) The phase margin, ɸM, is related to the damping coefficient, ζ, by the following equation:
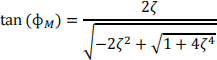
What is the required phase margin?
v) A lead compensator, parameterised by a centre frequency, z, and a ratio of break-frequencies, β, is to be used to increase the phase margin and so reduce the overshoot. The maximum phase shift provided by a lead compensator, ɸmax, is given by the following equation:
What is the ratio in break-frequencies that will achieve the required overshoot?
vi) Comment on the ability to construct such a compensator with passive components.
2023-08-24